Jetson Nano
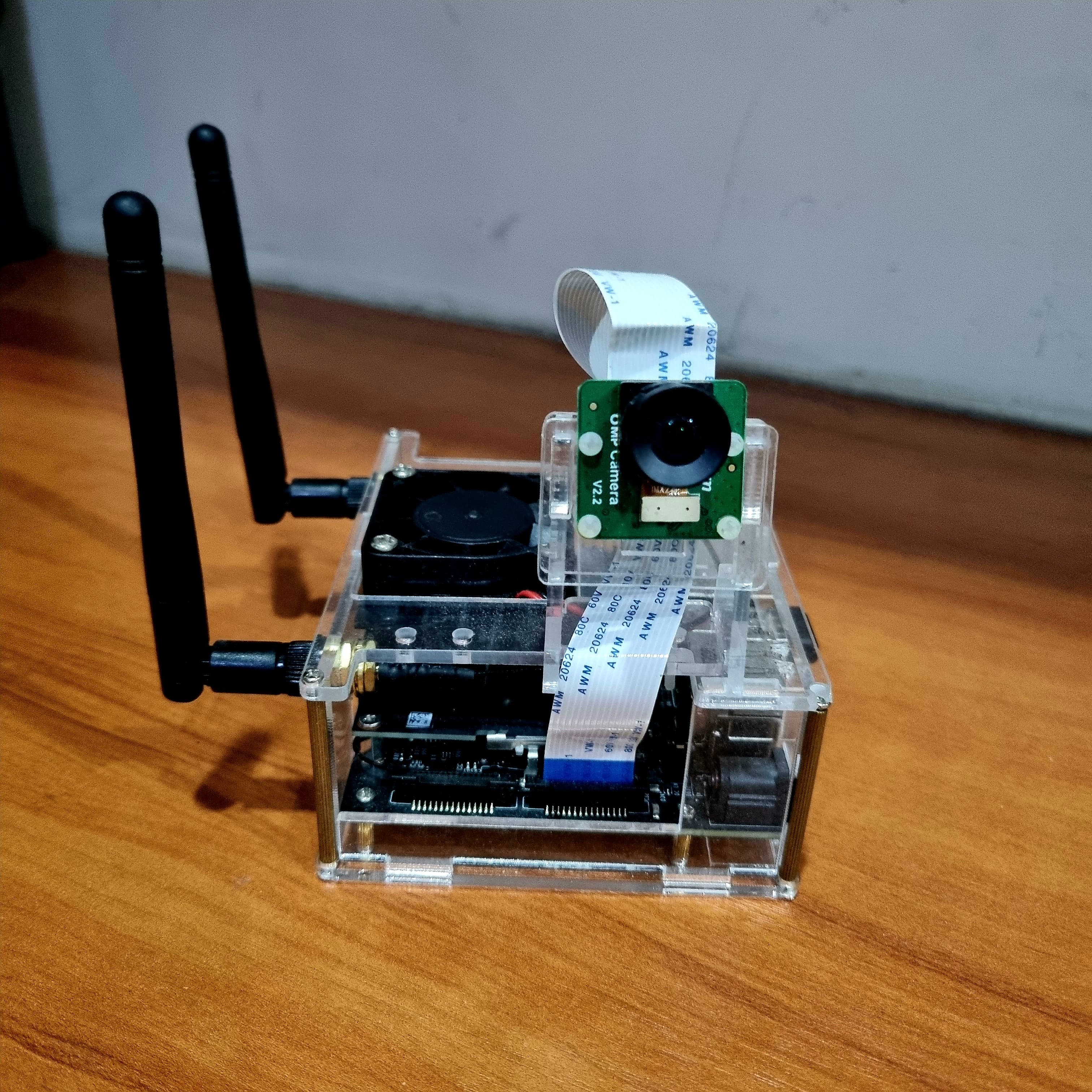
Developed a series of computer vision projects on the NVIDIA Jetson Nano, leveraging CUDA parallel computing to optimize processing efficiency. These projects included experimentation with Jetson Inference and various computer vision libraries to enhance the system’s capabilities in object detection, classification, and tracking.
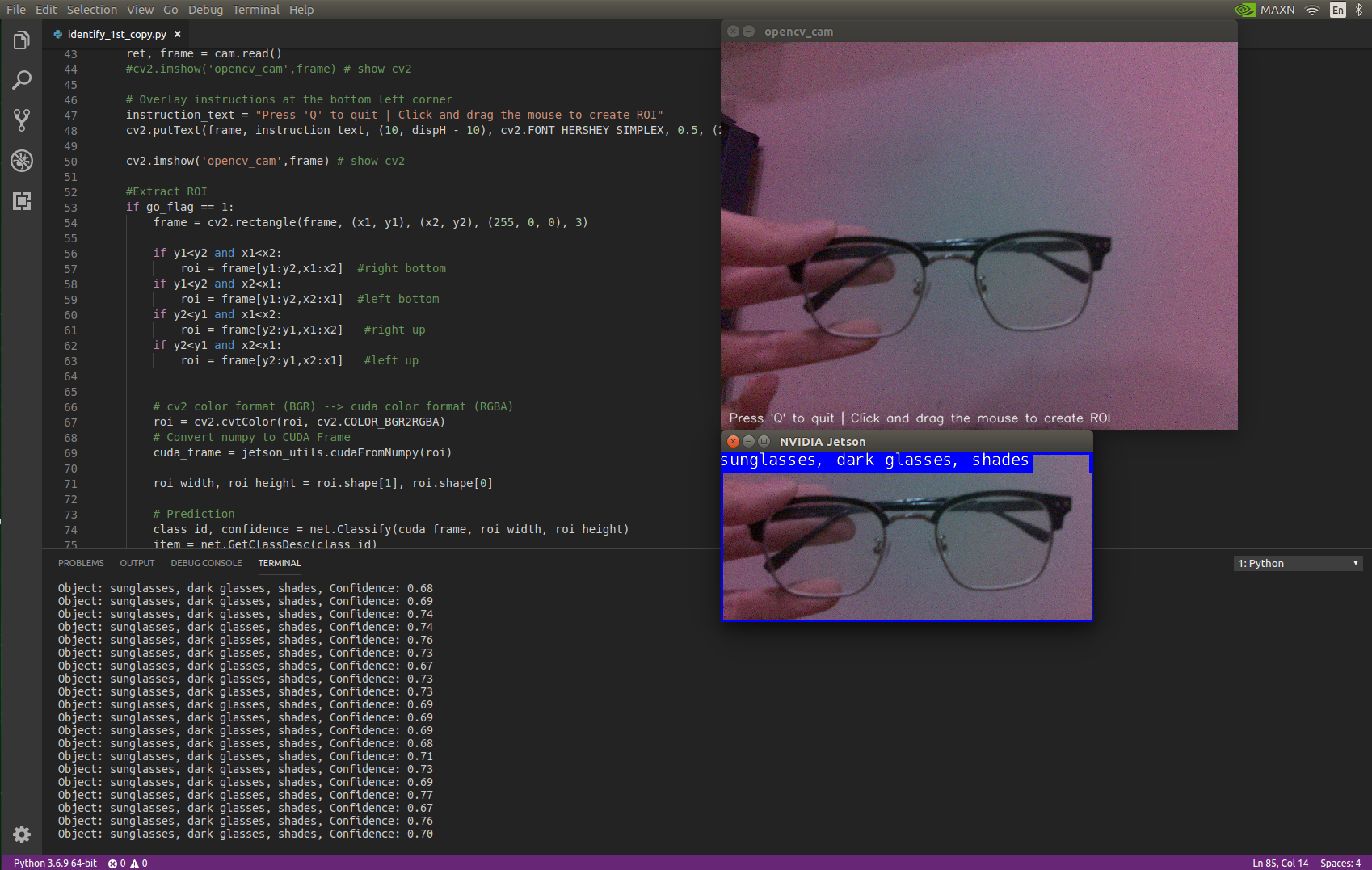
The program shown is a real-time object classification system built for NVIDIA Jetson Nano. It uses OpenCV for video capture and allows the user to select a region of interest (ROI) within the camera feed by clicking and dragging the mouse. Once the ROI is selected, the extracted frame section is processed with NVIDIA’s Jetson Inference library, which classifies the object within the ROI using a pre-trained neural network (GoogleNet in this case). The system displays the classification results, including the detected object label and confidence score, both in the terminal and overlaid on the video output.
The project can be found on Github.